���@RS�Q�R�QC�ʐM�@�i�@PIC�@�|�@PIC�ԁ@�j �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@�@ �@�@�@�@�@�@
�@�@�@�@�@�@
�@�@PIC���m���ꂼ���TX�ARX�[�q���^�X�L�����ɒ��ڐڑ����邾����RS232C�ʐM���\�ł��B�ȉ��ɁARS232C�ɂ��
�@PIC�ԒʐM�̗���Љ�܂��B
�@�@�@
�@�@
�@�i�P�j�@�����̑���M�@ �i��{�ҁ@�@putc() �Agetc() �^�C���A�E�g�t�@�j�@
�i�Q�j�@������̑���M�@�i��{�ҁ@�@printf() �Agetc()�@�j
�@�i�R�j�@������̑���M�@ (���p�ҁ@�@�T���`�F�b�N�A�@�n���h�V�F�[�N�A�^�C���A�E�g�j
�i�P�j�@��{�I����M�@�i�@putc() �Agetc() �^�C���A�E�g�t�@�j
�@�@�@putc()�Aget()���g�p�����ȒP��RS232C�ʐM�̗���Љ�܂��B
�@�@�@
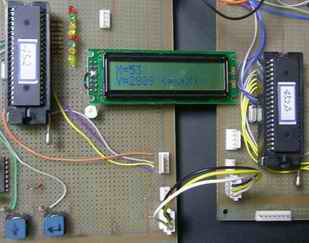
������i�d�l��
�@���@�f�[�^���M�� PIC
�@�@�E�@�@�O�`�Q�T�T�̐���X���P�b���ƂɃC���N�������g���Ȃ���@TX�[�q����RS�Q�R�QC�ő��M����B
�@�@�E�@�@�t���̂P�s�ڂɑ��M�f�[�^��\������B
�i��j�@X = 100
�@�@�@�@ �t���̂Q�s�ڂɎ�M�f�[�^��\������B
�i��j�@Y= 10000
( = X * X )
�@ �E�@�^�C���A�E�g����������Ȃ�
�@���@�f�[�^��M�� PIC
�E�@��M�����f�[�^���@�Q�悵�ĕԐM����
�@ �E�@�^�C���A�E�g����������Ȃ�
�@�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC�P�WF�S�T�Q�~�Q���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
�@
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
 �@
�@
�ȉ��̃v���O������̒��ɂ���t���\���퐧�䃉�C�u�����@1llcd_lib.c�́@��ՓN�炳�����v���ꂽ���̂ł��B
�@���v���O�����၄
/*
�@�@���M�� PIC�i�t���t�j
�@�@�@�E�@�f�[�^X�𑗐M����B
�@�@�@�E�@��M�f�[�^Y����M����B
�@�@�@�E�@�t���̂P�s�ڂɑ��M�f�[�^X��\������B
�@�@�@�E�@�t���̂Q�s�ڂɎ�M�f�[�^Y��\������B
PIC18F452 + �t���@���@ RS232C(5V)�@���@PIC18F452
PIC18F452�@+�@�t���@���@ RS232C(5V)�@���@PIC18F452
*/
#include "18f452.h"
#use delay(clock=40000000) // 40MH���i�V�X�e���N���b�N���g���j��10MH���i�O�����U�q���g���j�~4�iPLL�{���j
#FUSES H4,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7) // �{�[���[�g = 9600bps TX=RC6,RX=RC7
#define NAK 0x15 // �^�C���A�E�g�����ꍇ�̑��M�����Ƃ���NAK���g�p
#define timeout_Time 100 // �^�C���A�E�g���Ԃ̐ݒ�@�F�@�P��msec
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //rs
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
unsigned int timed_getc() //�^�C���A�E�g�tgetc()
{
int32 timeout;
unsigned int returnValue;
timeout = 0;
while(!kbhit()&&(++timeout<timeout_Time*100)) // �^�C���A�E�g���ԓ��Ƀf�[�^����M���Ȃ����while()���[�v����
//�^�C���A�E�g���� �� 100(10��sec�@�~�@100�@�~�@100�jmsec
delay_us(10); // 10��sec
if(kbhit()) //�^�C���A�E�g���ԓ��Ƀf�[�^���擾�����ꍇ�̓f�[�^���擾���A���̃f�[�^��Ԃ�
returnValue = getc();
else //�@�^�C���A�E�g���ԓ��Ńf�[�^���擾�ł��Ȃ������ꍇ��NAK��Ԃ�
returnValue = NAK;
return returnValue;
}
void Tranceiver()
{
unsigned int X = 0;
unsigned long int Y;
unsigned int temp1,temp2;
for(X = 0; X < 255 ;X++)
{
putc(X);
temp1 = timed_getc(); // 0�`7 �r�b�g�f�[�^
temp2 = timed_getc(); // 8�`15 �r�b�g�f�[�^
Y = (unsigned long int)temp1 + ((unsigned long int)temp2 << 8);
//16�r�b�g�ɃL���X�g���Ă���r�b�g�V�t�g
lcd_clear();
printf(lcd_data,"X=%u",X);
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,"Y=%lu (=X*X)",Y);
delay_ms(1000);
}
}
main(){
set_tris_c(0b10000000);// �K�{ in = RC7 & RC4
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"First Line !!");
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,"Second Line");
delay_ms(500);
timed_getc(); // �@��M�o�b�t�@�[�N���A
while(1)
{
Tranceiver();
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
//********************************************************************************
//********************************************************************************
/*
�@��M�� PIC�i�t���Ȃ��j
�@�@�@�@��M�f�[�^���悵�ĕԐM
*/
//********************************************************************************
//********************************************************************************
#include <18F452.h>
#include "string.h"
#use delay(clock=40000000)
#FUSES EC,NOWDT,,PUT,BROWNOUT,BORV42,NOPROTECT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7) // �{�[���[�g = 9600bps TX=RC6,RX=RC7
#byte port_PIR1=0x0F9E
#define NAK 0x15 // �^�C���A�E�g�����ꍇ�̑��M�����Ƃ���NAK���g�p
#define timeout_Time 1500 // �^�C���A�E�g���Ԃ̐ݒ�@�F�@�P��msec
unsigned int timed_getc() //�^�C���A�E�g�tgetc()
{
int32 timeout;
unsigned int returnValue;
timeout = 0;
while(!kbhit()&&(++timeout<timeout_Time*100)) // �^�C���A�E�g���ԓ��Ƀf�[�^����M���Ȃ����while()���[�v����
//�^�C���A�E�g���� �� 1500(10��sec�@�~�@100�@�~�@1500�jmsec
delay_us(10); // 10��sec
if(kbhit()) //�^�C���A�E�g���ԓ��Ƀf�[�^���擾�����ꍇ�̓f�[�^���擾���A���̃f�[�^��Ԃ�
returnValue = getc();
else //�@�^�C���A�E�g���ԓ��Ńf�[�^���擾�ł��Ȃ������ꍇ��NAK��Ԃ�
returnValue = NAK;
return returnValue;
}
void Tranceiver() //�@����M��
{
unsigned int ReceiveData,Out1,Out2;
unsigned long int Out;
port_PIR1 = 0x10010000; // �t���[�~���O�G���[�A�I�[�o�[�����G���[�N���A
ReceiveData = timed_getc();
Out = (unsigned long int)ReceiveData * (unsigned long int)ReceiveData;
Out1 = (unsigned int)Out;
Out2 = (unsigned int)(Out >> 8); // ���16�r�b�g��8�r�b�g�r�b�g�V�t�g�@���@��ʂW�r�b�g�̓E�o
putc(Out1);
putc(Out2);
}
main(){
set_tris_c(0b10000000);// �K�{ in = RC7 & RC4
while(1) //�@
{
Tranceiver();
}
return 0;
}
�@
�@�@�����쌋�ʁ�
�@�@�f�[�^���M��PIC���瑗�M�f�[�^�Ƃ��ĂP�T�O�𑗂������̉t����ʂ̎ʐ^�����L�Ɏ����܂��B
�@��M�f�[�^ Y=�Q�Q�T�O�O�͎�M��PIC���v�Z�����v�Z���ʁi�@�Q�Q�T�O�O���P�T�O�~�P�T�O�@�j�ł��B
�@

�i�Q�j�@��{�I����M�@�i�@printf() �Agetc()�@�j �@�@�@�@�@�b�b�r�ҁ@�o�h�b18�e452
�@CCS�R���p�C���AC18�R���p�C���̃R���\�[���W���o�͊�printf()��RS�Q�R�QC���Ή����Ă��܂��B�@printf()��������
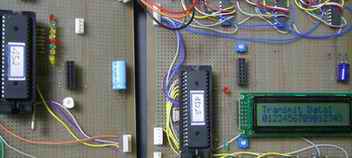
�������A������PIC�Ԃő���M����ꍇ�A��M���ł̏������x���Ƒ���M�����܂������܂���B��M���ɉt��������
����ꍇ�Ɏ�M���Ƃɕ\�����Ă���ƕ\�������͎��Ԃ������邽�ߎ�M�����܂��ł��܂���B�A�����đ����Ă���f�[�^��
��M���Ƃɂ͕\�������ɂ����������ɋL���������ƈꊇ���ĉt���ɕ\�����邷�����Љ�܂��B
������i�d�l��
�@���@�f�[�^���M�� PIC
�@�@�E300msec���ɉ��L�̂Q�̃f�[�^�P�ƃf�[�^�Q�����݂ɂ�����
�@�@�@�f�[�^�P
�@�@�@�@��M���̂P�s�ڗp�f�[�^�@�c�c�@Transmit Data1
��M���̂Q�s�ڗp�f�[�^�@�c�c�@0123456789012345
�f�[�^�Q
�@ �@�@ ��M���̂Q�s�ڗp�f�[�^�@�c�c�@Transmit Data2
��M���̂Q�s�ڗp�f�[�^�@�c�c abcdefghijklmnop
�@�@�E�f�[�^�Q�𑗐M������t���\�����߂Ƃ��āhSTX�h(= 0x02)�𑗐M����
�@���@�f�[�^��M�� PIC
�E�@��M�����f�[�^�͂����������ɋL������B
�@ �E�@�t���\�����߁hSTX�h(= 0x02)����M������t���ɕ\������
�@�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC�P�WF�S�T�Q�~�Q���g�p�����ꍇ�̉�H�}�̗�������L�Ɏ����܂�
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
 �@�@�@�@�@�@�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�ȉ��̃v���O������̒��ɂ���t���\���퐧�䃉�C�u�����@1llcd_lib.c�́@��ՓN�炳�����v���ꂽ���̂ł��B
�@���v���O�����၄
//****************************************************************
// ���M���@PIC�@�̃v���O����
//****************************************************************
//PIC18F452+�t���@�@���@ RS232C(5V)�@���@PIC16F873+�t��
//�R�b���ɕ�����f�[�^�P�A�Q�����݂ɑ���B�@ �f�[�^�P�A�Q�ɂ���M�����|�̐M��ACK�ANAC�������݂Ŏ��t���ɕ\������
#include "18f452.h"
#use delay(clock=40000000) // 40MH���i�V�X�e���N���b�N���g���j��10MH���i�O�����U�q���g���j�~4�iPLL�{���j
#FUSES H4,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,RCV=PIN_C7,XMIT=PIN_C6) // �{�[���[�g = 9600bps TX=RC6,RX=RC7,
#define STX 0x02 // �r�s�w
void SendData1()
{
putc('\r'); //�@�����F �t����ʂ��N���A���@�����\���ʒu����s�ڂ̐擪�ֈړ�
printf("Transmit Data1 "); //�����f�[�^�𑗐M
putc('\n'); //�@�����F�@�����\���ʒu���Q�s�ڂ̐擪��
printf("0123456789012345");//�����f�[�^�𑗐M
putc(STX);//�@�t����ʕ\��
}
void SendData2()
{
putc('\r'); //�@�����F �t����ʂ��N���A���@�����\���ʒu����s�ڂ̐擪�ֈړ�
printf("Transmit Data2 "); //�����f�[�^�𑗐M
putc('\n'); //�@�����F�@�����\���ʒu���Q�s�ڂ̐擪��
printf("abcdefghijklmnop");//�����f�[�^�𑗐M
putc(STX);//�@�t����ʕ\��
}
main(){
set_tris_c(0b10000000);// �K�{ in = RC7
delay_ms(1000); //��M������M�����܂ő҂�
while(1)
{
SendData1();
delay_ms(3000);
SendData2();
delay_ms(3000);
}
return 0;
}
//******************************************************************
//�@ ��M���@PIC
//******************************************************************
#include <18F452.h>
#use delay(clock=40000000)
#FUSES EC,NOWDT,,PUT,BROWNOUT,BORV42,NOPROTECT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7) // TX=RC6,RX=RC7
#define STX 0x02 // �r�s�w
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
int n = 0,i=0;
char RX1[17],RX2[17];
char RX1_LCD[17],RX2_LCD[17];
int data1;
int LineMode = 1;
void LCD()
{
data1 = getc();
switch(data1)
{
case '\r':
LineMode = 1; // 1�s�ڂ̃��[�h
n = 0; // �������M���ԃ��Z�b�g
break;
case '\n': // lcd_cmd(0xC0); case 0x0a: LF('\n')�Ȃ�@�Q�s�ڂ̐擪��
LineMode = 2;
n = 0; // �������M���ԃ��Z�b�g
break;
case STX: //�@�\���J�n����
for(i = 0; i < 16; i++)
{
RX1_LCD[i] = RX1[i]; //�P�s�ڂ̃f�[�^
RX1_LCD[16] = '\0';
RX2_LCD[i] = RX2[i]; //�Q�s�ڂ̃f�[�^
RX2_LCD[16] = '\0';
}
lcd_clear(); //�t���N���A
printf(lcd_data,RX1_LCD); //�P�s�ڂ̃f�[�^���ꊇ�t���\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
printf(lcd_data,RX2_LCD); //�Q�s�ڃf�[�^���ꊇ�t���\��
break;
default:
switch(LineMode)
{
case 1: //�P�s�ڂ̃f�[�^
RX1[n] = data1; break;//�P�s�ڃf�[�^���������ɋL��
case 2: //�Q�s�ڂ̃f�[�^
RX2[n] = data1; break;//�Q�s�ڃf�[�^���������ɋL��
default: break;
}
n++;
break;
}
}
main(){
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"First Line");
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,"Second Line");
delay_ms(500);
while(1)
{
if(kbhit()) LCD(); //RS232C�̃f�[�^�i�P�o�C�g�j����M�������Ă���Ȃ�@LCD()���s
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
�@�����쌋�ʁ�
�@��M��PIC�ɐڑ�����Ă���t����ʂ̎ʐ^�������܂��B
�@�@�@�f�[�^�P
�@�@�@�@��M���̂P�s�ڗp�f�[�^�@�c�c�@Transmit Data1
��M���̂Q�s�ڗp�f�[�^�@�c�c�@0123456789012345
�f�[�^�Q
�@ �@�@ ��M���̂P�s�ڗp�f�[�^�@�c�c�@Transmit Data2
��M���̂Q�s�ڗp�f�[�^�@�c�c abcdefghijklmnop
| �f�[�^�P��M�� |
|
�f�[�^�Q��M�� |
 |
|
 |
���@�o�h�b-�o�h�b�ԁ@�@�q�r232�b�ʐM�@�@�@�@�@�@���@�b30�@�@�o�h�b24�ҁ�
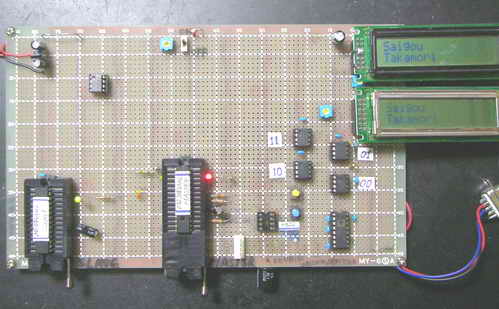
�@�o�h�b24�e�Ԃ̂q�r232�b�ʐM�̗���Љ�܂��B
������i�̎d�l���@
�@�E�o�h�b24�e�Ԃ��q�r232�b�ʐM�������Ȃ�
�@�E���M���o�h�b24�e���������ςŏ���������𑗐M����B�B
�@�@���M����镶���̍Ō���ɂ́f�����f�t������B
�@�@�o�h�b���ł͂����̕��������M������ȉ��̕�������o�b���ɕԐM����B
�@�@�@�@�@Sakamoto�@
�@���@Ryouma
�@�@�@�@�@Saigou�@�@�@�@ ���@Takamori
�@�@�@�@�@Katsura �@�@�@
���@Kogorou
�@�@�@�@�@���̑��@ �@
�@���@Pardon?
�@�E�@��M��PIC�ł͎�M������A�ԐM��������t���ɕ\������B
�@�E�@���M���o�h�b�ł����M������A��M��������t���ɕ\������B
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC24�eJ64GA002���g�p�����ꍇ�̉�H�}�̗�������L�Ɏ����܂�
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@���v���O�����၄
//RS232C ����M�i���荞�ݗL��j
//�@PIC�|PIC�@�ԁ@�@�@�@�@PIC24FJ64GA002 �`�@PIC24FJ64GA002
//���M��
#include "p24FJ64GA002.h"
#include <stdio.h>
#include <uart.h>
#include <timer.h>
#include "1lcd_lib_C30.h"
#include "1lcd_lib_c30.c"
/// �R���t�B�M�����[�V���� �r�b�g�̐ݒ�
_CONFIG1
(
JTAGEN_OFF & //JTAG�|�[�g�F�@OFF
GCP_OFF & //�R�[�h�v���e�N�g�F�@OFF
GWRP_OFF & //�������݃v���e�N�g�F�@OFF
BKBUG_OFF & //�o�b�N�O�����h�f�o�b�N�F�@OFF
COE_OFF & //�N���b�v�I���@�G�~�����[�V�����F�@OFF
ICS_PGx1& //ICD�s���̑I���F�@EMUC/EMUD��PGC1/PGD1�Ƌ��p
FWDTEN_OFF //�E�H�b�`�h�b�N�^�C�}�F�@OFF
)
_CONFIG2
(
FNOSC_PRI & //�O�t�����U�q20MHZ�@PLL�Ȃ��@�@���@�V�X�e���N���b�N�F20MHZ
POSCMOD_HS //���U��H���[�h�@Oscillator Selection:�@ HS�@�i�O�t�����U��H�@���U���g�����x���FHS�j
)
int i = 0;
char buf[20];
char Buf[20];
char Saigou[] = "Saigou";
char Katsura[] = "Katsura";
char Sakamoto[] = "Sakamoto";
char Tokyo[] = "Tokyo";
char* str;
char Space = ' ';
int count_time = 0;
unsigned int count_N = 0;
void delay_ms(unsigned int N) //�E�F�C�g��
{
__delay32(Clock/2000*N);
}
void _ISR _T1Interrupt(void) //100msec���̊����ݔ���
{
IFS0bits.T1IF = 0; //IFS0���W�X�^�́@T1IF(�^�C�}�P�̊������o�j�t���O���Z�b�g
count_time++;
if(count_time >= 30) //3�b�o������
{
count_time = 0;
if(count_N < 1)
{
printf(Saigou); //�@������Saigou�@���Ɉꊇ���M
putcUART1('\r'); //�@������I�[���䕶���𑗐M
lcd_clear(); //�S����
lcd_cmd(0x80); //�P�s�ڂ�
lcd_str(Saigou); // �J�n���b�Z�[�W1�s�ڕ\��
}
else if(count_N < 2)
{
printf(Katsura);
putcUART1('\r'); //�@������I�[���䕶���𑗐M
lcd_clear(); //�S����
lcd_cmd(0x80); //�P�s�ڂ�
lcd_str(Katsura); // �J�n���b�Z�[�W1�s�ڕ\��
}
else if(count_N < 3)
{
printf(Sakamoto);
putcUART1('\r'); //�@������I�[���䕶���𑗐M
lcd_clear(); //�S����
lcd_cmd(0x80); //�P�s�ڂ�
lcd_str(Sakamoto); // �J�n���b�Z�[�W1�s�ڕ\��
}
else
{
printf(Tokyo);
putcUART1('\r'); //�@������I�[���䕶���𑗐M
lcd_clear(); //�S����
lcd_cmd(0x80); //�P�s�ڂ�
lcd_str(Tokyo); // �J�n���b�Z�[�W1�s�ڕ\��
}
count_N++;
if(count_N >= 4)count_N = 0;
}
}
void _ISR _U1RXInterrupt(void) //RS232C ��M������
{
IFS0bits.U1RXIF = 0; //��M�����݃t���O�N���A
while(!DataRdyUART1()); //UART�o�b�t�@�[�Ƀf�[�^������܂ł܂�
buf[i] = getcUART1();
if(buf[i] == '\r') //�@'\r'����M�����ꍇ
{
buf[i] = '\0';
//�t���ɏo��
sprintf(Buf,"%s%c",&buf[0],Space);//arguement���Ȃ��ƒx�� C30�̃o�O�H
lcd_cmd(0xc0); //�P�s�ڂ�
lcd_str(Buf); //�t���\��
// lcd_str(&buf[0]); // ���̃R�[�h�ł͒x��!!
i = 0;
}
else //'\r'�ȊO����M�����ꍇ
{
i++;
}
}
main()
{
CLKDIV = 0; // set 1:1
AD1PCFG = 0xFFFF; // �|�[�gA�S�f�B�W�^���Ɏw��//ANx�̃|�[�g���ׂĂɑ��ĕK�{
TRISB = 0b0000000000001000; // �|�[�gB�@ RB3:RX�͓��͂� �A���̑�RB5�FSDA�ARB6�FSCL���͏o�͂ɐݒ�
// UART1�s�����t�@���}�b�s���O
RPINR18bits.U1RXR = 3; // UART1 RX to RP3
RPOR1bits.RP2R = 3; // UART1 TX to RP2
/// UART1�����ݒ�@9600bps 8�r�b�g �p���e�B�Ȃ��A�t���[����Ȃ�
U1BRG = 64; // 9600bps at �V�X�e���N���b�N20MHz
//U1BRG = (Fosc(Hz)/2/16/baud(bps) - 1
// = 20000000/2/16/9600 - 1 = 64.1 ���@64)
U1MODE = 0b1000100000000000; // UART1�����ݒ� //U1MODE���W�X�^�ݒ�
U1STA = 0b0000010000000000; // UART1�����ݒ� //U1STA���W�X�^�ݒ�
/// �^�C�}�P�F�@�����@100msec
OpenTimer1(T1_ON & //�^�C�}�PON
T1_GATE_OFF & //�Q�[�g����off
T1_PS_1_256 & //�v���X�P�[���@1/256
T1_SYNC_EXT_OFF & //�N���b�N��������OFF
T1_SOURCE_INT, //�N���b�N���F�����N���b�N T1_SOURCE_INT�F Internal clock source
6249); //100msec��10�~1000�~�i32MHz/2MHz)/256=6250�@�@PR1�ݒ�l=6249( = 6250 - 1 )
//24F��2�V�X�e���N���b�N��1���߂ł���
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"RS232C Master !!%c",Space);//arguement���Ȃ��ƒx�� C30�̃o�O�H
lcd_cmd(0x80); //�P�s�ڂ�
lcd_str(Buf); //�t���\��
delay_ms(1000);
ConfigIntTimer1(T1_INT_PRIOR_5 & T1_INT_ON); //�����݃��x���T�@�^�C�}�P������ON
EnableIntT1; //��������
SetPriorityIntU1RX(6);//RS232C��M������ON�@���x��6 //�������傫�����������ݗD��x��
EnableIntU1RX; //��M��������
while(1)
{
if(U1STAbits.OERR || U1STAbits.FERR)
{
U1STA &= 0xFFF0; //�I�[�o�[�����G���[�A�t���[�~���O�G���[�A�p���e�B�G���[�N���A
U1MODEbits.UARTEN = 0; //UARAT������
U1MODEbits.UARTEN = 1;
}
}
return 0;
}
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή����łɕύX�������̂ł��B
//*************************************************************************
#include "p24FJ64GA002.h"
#define Clock 20000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB15 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB14 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB13 //LCD��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB12 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATBbits.LATB1 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATBbits.LATB0 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C30�R���p�C���[
// �������͈ȉ�
//�@�@�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C30.h"
unsigned int _1usec; // 1��sec�҂ɕK�v�ȃE�F�C�g��
unsigned int _50usec; //50��sec�҂ɕK�v�ȃE�F�C�g��
unsigned long N_msec; // 1msec�҂ɕK�v�ȃE�F�C�g��
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
__delay32(_1usec); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
__delay32(_1usec); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
__delay32(2*N_msec); // 2msec�҂�
else
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
// __delay32(15*N_msec); //15msec�E�F�C�g
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
_1usec =(unsigned int)( Clock / 2000000); // 1��sec�ɗv����E�F�C�g��
_50usec = (unsigned int)(Clock / 2000000 * 50); //50��esc�ɗv����E�F�C�g��
N_msec = (unsigned long int)(Clock / 2000); // 1msec�ɗv����E�F�C�g��
// = Clock / 2000000*1000
__delay32(20*N_msec); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(5*N_msec); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
//----------------------------------------------------------------------------------------
//---------------------------------------------------------------------------------------
//�ԐM�� �v���O����
//RS232C ����M�i���荞�݂Ȃ��j �ԐM��
//�@PC�|PIC�@�ԁ@�@�@�@�@PIC24FJ64GA002
#include "p24FJ64GA002.h"
#include <stdio.h>
#include <uart.h>
#include "1lcd_lib_C30.h"
#include "1lcd_lib_c30.c"
/// �R���t�B�M�����[�V���� �r�b�g�̐ݒ�
_CONFIG1
(
JTAGEN_OFF & //JTAG�|�[�g�F�@OFF
GCP_OFF & //�R�[�h�v���e�N�g�F�@OFF
GWRP_OFF & //�������݃v���e�N�g�F�@OFF
BKBUG_OFF & //�o�b�N�O�����h�f�o�b�N�F�@OFF
COE_OFF & //�N���b�v�I���@�G�~�����[�V�����F�@OFF
ICS_PGx1& //ICD�s���̑I���F�@EMUC/EMUD��PGC1/PGD1�Ƌ��p
FWDTEN_OFF //�E�H�b�`�h�b�N�^�C�}�F�@OFF
)
_CONFIG2
(
FNOSC_PRI & //�O�t�����U�q20MHZ�@PLL�Ȃ��@�@���@�V�X�e���N���b�N�F20MHZ
POSCMOD_HS //���U��H���[�h�@Oscillator Selection:�@ HS�@�i�O�t�����U��H�@���U���g�����x���FHS�j
)
int i = 0;
char buf[20];
char Buf[20];
char Saigou[] = "Saigou";
char Takamori[] = "Takamori";
char Katsura[] = "Katsura";
char Kogorou[] = "Kogorou";
char Sakamoto[] = "Sakamoto";
char Ryouma[] = "Ryouma";
char Pardon[] = "Pardon?";
char* str;
char Space = ' ';
void delay_ms(unsigned int N) //�E�F�C�g��
{
__delay32(Clock/2000*N);
}
void LCD() //��M���t���\��
{
while(!DataRdyUART1()); //UART�o�b�t�@�[�Ƀf�[�^������܂ł܂�
buf[i] = getcUART1();
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
if(strcmp(buf,Sakamoto) == 0)str = Ryouma;
else if(strcmp(buf,Saigou) == 0) str = Takamori;
else if(strcmp(buf,Katsura) == 0) str = Kogorou;
else str = Pardon;
printf(str); //�@�ԐM���@������Ƃ���PC�Ɉꊇ���M
putcUART1('\r'); //�@������I�[���䕶���𑗐M
//�t���ɏo��
lcd_clear(); //�S����
lcd_str(&buf[0]); // �J�n���b�Z�[�W1�s�ڕ\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"%s%c",str,Space); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf); // �J�n���b�Z�[�W2�s�ڕ\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
i++;
}
}
main()
{
CLKDIV = 0; // set 1:1
AD1PCFG = 0xFFFF; // �|�[�gA�S�f�B�W�^���Ɏw��//ANx�̃|�[�g���ׂĂɑ��ĕK�{
TRISB = 0b0000000000001000; // �|�[�gB�@ RB3:RX�͓��͂� �A���̑�RB5�FSDA�ARB6�FSCL���͏o�͂ɐݒ�
// UART1�s�����t�@���}�b�s���O
RPINR18bits.U1RXR = 3; // UART1 RX to RP3
RPOR1bits.RP2R = 3; // UART1 TX to RP2
/// UART1�����ݒ�@9600bps 8�r�b�g �p���e�B�Ȃ��A�t���[����Ȃ�
U1BRG = 64; // 9600bps at �V�X�e���N���b�N20MHz
//U1BRG = (Fosc(Hz)/2/16/baud(bps) - 1
// = 20000000/2/16/9600 - 1 = 64.1 ���@64)
U1MODE = 0b1000100000000000; // UART1�����ݒ� //U1MODE���W�X�^�ݒ�
U1STA = 0b0000010000000000; // UART1�����ݒ� //U1STA���W�X�^�ݒ�
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"RS232C Start !!%c",Space);//arguement���Ȃ��ƒx�� C30�̃o�O�H
lcd_str(Buf); //�t���\��
delay_ms(1000);
while(1)
{
LCD();
}
return 0;
}
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή����łɕύX�������̂ł��B
//*************************************************************************
#include "p24FJ64GA002.h"
#define Clock 20000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB15 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB14 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB13 //LCD��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB12 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATBbits.LATB1 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATBbits.LATB0 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C30�R���p�C���[
// �������͈ȉ�
//�@�@�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C30.h"
unsigned int _1usec; // 1��sec�҂ɕK�v�ȃE�F�C�g��
unsigned int _50usec; //50��sec�҂ɕK�v�ȃE�F�C�g��
unsigned long N_msec; // 1msec�҂ɕK�v�ȃE�F�C�g��
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
__delay32(_1usec); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
__delay32(_1usec); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
__delay32(2*N_msec); // 2msec�҂�
else
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
// __delay32(15*N_msec); //15msec�E�F�C�g
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
_1usec =(unsigned int)( Clock / 2000000); // 1��sec�ɗv����E�F�C�g��
_50usec = (unsigned int)(Clock / 2000000 * 50); //50��esc�ɗv����E�F�C�g��
N_msec = (unsigned long int)(Clock / 2000); // 1msec�ɗv����E�F�C�g��
// = Clock / 2000000*1000
__delay32(20*N_msec); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(5*N_msec); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
�����쌋�ʁ�
| �@���M�����@ |
�@�ԐM�����@ |
�t���\��
�㑤�@�c�c�@���M���t��
�@�@�@�@�@�@�@�@�@�P�s�ځF�@���M������
�@�@�@�@�@�@�@�@�A�Q�s�ځF�@��M������
�����@�c�c�@��M���t��
�@�@�@�@�@�@�@�@�@�P�s�ځF�@��M������
�@�@�@�@�@�@�@�@�A�Q�s�ځF�@�ԐM������ |
Saigou
|
Takamori
|
 |
Katsura
|
Kogorou
|
 |
| Sakamoto |
Ryouma |
 |
Tokyo
|
Pardon
|
 |
���@�o�h�b-�o�h�b�ԁ@�@�q�r232�b�ʐM�@�@�@�@�@�@���@�b32�@�@�o�h�b32MX�ҁ�
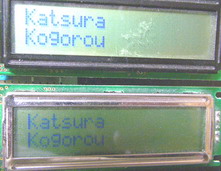
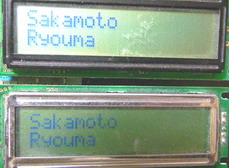
�@�o�h�b32MX�Ԃ̂q�r232�b�ʐM�̗���Љ�܂��B
������i�̎d�l���@
�@�EPIC32MX�Ԃ̂q�r232�b�ʐM�������Ȃ�
�@�E���M��PIC32MX���������ςŏ���������𑗐M����B�B
�@�@���M����镶���̍Ō���ɂ́f�����f�t������B
�@�@�o�h�b���ł͂����̕��������M������ȉ��̕�������o�b���ɕԐM����B
�@�@�@�@�@Sakamoto�@
�@���@Ryouma
�@�@�@�@�@Saigou�@�@�@�@ ���@Takamori
�@�@�@�@�@Katsura �@�@�@
���@Kogorou
�@�@�@�@�@���̑��@ �@
�@���@Pardon?
�@�E�@��M��PIC�ł͎�M������A�ԐM��������t���ɕ\������B
�@�E�@���M���o�h�b�ł����M������A��M��������t���ɕ\������B
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC32MX460512L���g�p�����ꍇ�̉�H�}�̗�������L�Ɏ����܂�
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@���v���O�����၄
//�@�@�@�@UART PIC-PIC�@ //���荞�ݕ����i���M���j
//�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@PIC32MX460F512L�@
#include <proc/p32mx460f512l.h> //PIC32MX460F512L
#include <plib.h> // PIC32 peripheral library
//for SYSTEMConfigPerformance()
#include <stdio.h>
#include "1lcd_lib_C32.h"
// Configuration
// CPU=80MHz Peri=80MHz,HS+PLL,Divider=1/2,PLL=x20,WDT=Off
#pragma config FNOSC=PRIPLL, POSCMOD=HS, FPLLIDIV=DIV_2
#pragma config FPLLMUL=MUL_20, FPBDIV=DIV_1, FPLLODIV=DIV_1
#pragma config FWDTEN=OFF, ICESEL=ICS_PGx2
//#define timeout_Time 1000 // �^�C���A�E�g���Ԃ̐ݒ�@�F�@�P��msec
#define timeout_count 1000
int i = 0;
char buf[20];
char Buf[20];
char Saigou[] = "Saigou";
char Katsura[] = "Katsura";
char Sakamoto[] = "Sakamoto";
char Tokyo[] = "Tokyo";
char* str;
char Space = ' ';
int count_time = 0;
unsigned int count_N = 0;
void delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(Clock/20000000)*usec;
do //�����F�@at�@Clock=80000000
{ //delay_us(1000)��1003��sec�A�@delay_us(100)��102��sec�Adelay_us(10)��11��sec�Adelay_us(1)��1.6��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
delay_us(1000);
}
/*
void ERR_clear() //�G���[�N���A
{
if((U2STAbits.OERR || U2STAbits.FERR))
{
U2STA = 0; //�X�e�[�^�X���W�X�^���Z�b�g//�G���[�t���O���N���A
U2MODEbits.ON = 0; //UART�F������
U2MODEbits.ON = 1; //UART�F�L����
}
}
*/
void __ISR(_UART2_VECTOR, ipl2) IntUart2Handler(void)
{
//int timeout = 0;
if(mU2RXGetIntFlag()) //�@RX�̊��荞�݁H
{
mU2RXClearIntFlag(); //�@���荞�݃t���O�N���A
// while(!kbhit()&&(++timeout<timeout_Time*100)) // �^�C���A�E�g���ԓ��Ƀf�[�^����M���Ȃ����while()���[�v����
//while((!DataRdyUART2()) && (++timeout < timeout_Time*100));
buf[i] = getcUART2();
if(buf[i] == '\r') //�@'\r'����M�����ꍇ
{
buf[i] = '\0';
//�t���ɏo��
sprintf(Buf,"%s%c",&buf[0],Space);//arguement���Ȃ��ƒx�� C30�̃o�O�H
lcd_cmd(0xc0); //�P�s�ڂ�
lcd_str(Buf); //�t���\��
i = 0;
}
else //'\r'�ȊO����M�����ꍇ
{
i++;
}
}
}
int main(void)
{
SYSTEMConfigPerformance(80000000); // �V�X�e���œK��
TRISE = 0;
TRISFbits.TRISF4 = 1;
TRISFbits.TRISF5 = 0;
OpenUART2 //UART2�̐ݒ�iU2MODE���W�X�^,U2STA���W�X�^,U2BRG���W�X�^�̐ݒ�j
(
UART_EN | // Module Enable // UART enable/disable
UART_IDLE_CON | // Work in IDLE mode // UART_IDLE_CON
UART_RX_TX | // Communication through usual pins //UART communication with ALT pins
UART_DIS_WAKE | // Disable wake-up //UART Wake-up on Start
UART_DIS_LOOPBACK | // Loop back disabled //UART Loopback mode enable/disable
UART_DIS_ABAUD | // Input to Capture module from ICx pin//Input to Capture module
UART_NO_PAR_8BIT | // no parity 8 bit // Parity and data bits select
UART_1STOPBIT | // 1 stop bit// Number of Stop bits
UART_IRDA_DIS | // IRDA encoder and decoder disabled //IRDA Enable/Disable
UART_DIS_BCLK_CTS_RTS| // CTS and RTS pins are disabled
UART_MODE_SIMPLEX | //RTS Mode Select
UART_NORMAL_RX | //Recievie Polarity
UART_BRGH_SIXTEEN, //BRGH = 16 //High Baud Rate Select
UART_TX_PIN_LOW | //UART Transmit Break bit
UART_TX_ENABLE | //UART transmit enable/disable
UART_RX_ENABLE | //UART recieve enable/disable
UART_INT_RX_CHAR | //UART Receive Interrupt mode select
UART_ADR_DETECT_DIS| //UART address detect enable/disable
UART_RX_OVERRUN_CLEAR, // Rx Buffer Over run status bit clear //UART OVERRUN bit clear
(unsigned int)(80000000/16/9600-1) // = Fosc/BRGH/Baud Rate -1 //baud rate: 9600bps
);
setbuf(stdout,NULL); //Line buffering off
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"PI32MX795F460L");//
lcd_str(Buf); //�t���ɕ\��
ConfigIntUART2(UART_INT_PR2 | UART_RX_INT_EN); //UART2���荞�݃��x�������x��2�ɐݒ�
INTEnableSystemMultiVectoredInt(); //�}���`�x�N�g�����荞����
while(1)
{
printf(Saigou); //�@������Saigou�@���Ɉꊇ���M
putcUART2('\r'); //�@������I�[���䕶���𑗐M
lcd_clear(); //�S����
lcd_cmd(0x80); //�P�s�ڂ�
lcd_str(Saigou); // �J�n���b�Z�[�W1�s�ڕ\��
delay_ms(3000);
printf(Katsura);
putcUART2('\r'); //�@������I�[���䕶���𑗐M
lcd_clear(); //�S����
lcd_cmd(0x80); //�P�s�ڂ�
lcd_str(Katsura); // �J�n���b�Z�[�W1�s�ڕ\��
delay_ms(3000);
printf(Sakamoto);
putcUART2('\r'); //�@������I�[���䕶���𑗐M
lcd_clear(); //�S����
lcd_cmd(0x80); //�P�s�ڂ�
lcd_str(Sakamoto); // �J�n���b�Z�[�W1�s�ڕ\��
delay_ms(3000);
printf(Tokyo);
putcUART2('\r'); //�@������I�[���䕶���𑗐M
lcd_clear(); //�S����
lcd_cmd(0x80); //�P�s�ڂ�
lcd_str(Tokyo); // �J�n���b�Z�[�W1�s�ڕ\��
delay_ms(3000);
// ERR_clear(); //�i�v���[�v
}
}
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//*************************************************************************
#include <proc/p32mx460f512l.h> //PIC32MX460F512L
//#include <proc/p32mx795f512l.h> //PIC32MX460F512L
#define Clock 80000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATEbits.LATE7 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATEbits.LATE6 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATEbits.LATE5 //LCD��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATEbits.LATE4 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATEbits.LATE3 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATEbits.LATE2 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C32�R���p�C���[
// �������͈ȉ�
//�@�@�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C32.h"
void lcd_delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(Clock/20000000)*usec;
do
{
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void lcd_delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
lcd_delay_us(1000);
}
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
lcd_delay_us(1); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
lcd_delay_us(1); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
lcd_delay_ms(2); // 2msec�҂�
else
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
lcd_delay_ms(20); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(5); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
//�@�@�@�@UART PC-PIC�@ //���荞�ݕ����i�ԐM���j
//�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@PIC32MX460F512L�@
#include <proc/p32mx460f512l.h> //PIC32MX795F512L
#include <plib.h> // PIC32 peripheral library
//for SYSTEMConfigPerformance()
#include <stdio.h>
#include "1lcd_lib_C32.h"
// Configuration
// CPU=80MHz Peri=80MHz,HS+PLL,Divider=1/2,PLL=x20,WDT=Off
#pragma config FNOSC=PRIPLL, POSCMOD=HS, FPLLIDIV=DIV_2
#pragma config FPLLMUL=MUL_20, FPBDIV=DIV_1, FPLLODIV=DIV_1
#pragma config FWDTEN=OFF, ICESEL=ICS_PGx2
int i = 0;
char buf[20];
char Buf[20];
char Saigou[] = "Saigou";
char Takamori[] = "Takamori";
char Katsura[] = "Katsura";
char Kogorou[] = "Kogorou";
char Sakamoto[] = "Sakamoto";
char Ryouma[] = "Ryouma";
char Pardon[] = "Pardon?";
char* str;
char Space = ' ';
void __ISR(_UART2_VECTOR, ipl2) IntUart2Handler(void)
{
mU2RXClearIntFlag(); //�@���荞�݃t���O�N���A
while(!DataRdyUART2()); //UART�o�b�t�@�[�Ƀf�[�^������܂ł܂�
buf[i] = getcUART2();
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
if(strcmp(buf,Sakamoto) == 0)str = Ryouma;
else if(strcmp(buf,Saigou) == 0) str = Takamori;
else if(strcmp(buf,Katsura) == 0) str = Kogorou;
else str = Pardon;
printf(str); //�@�ԐM���@������Ƃ���PC�Ɉꊇ���M
putcUART2('\r'); //�@������I�[���䕶���𑗐M
//�t���ɏo��
lcd_clear(); //�S����
lcd_str(&buf[0]); // �J�n���b�Z�[�W1�s�ڕ\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"%s%c",str,Space); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf); // �J�n���b�Z�[�W2�s�ڕ\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
i++;
}
}
int main(void)
{
SYSTEMConfigPerformance(80000000); // �V�X�e���œK��
TRISE = 0;
TRISFbits.TRISF4 = 1;
TRISFbits.TRISF5 = 0;
OpenUART2 //UART2�̐ݒ�iU2MODE���W�X�^,U2STA���W�X�^,U2BRG���W�X�^�̐ݒ�j
(
UART_EN | // UART enable/disable
// UART_RX_TX | //UART communication with ALT pins
// UART_DIS_WAKE | //UART Wake-up on Start
// UART_DIS_LOOPBACK | //UART Loopback mode enable/disable
// UART_DIS_ABAUD | //Input to Capture module
UART_NO_PAR_8BIT | // Parity and data bits select
UART_1STOPBIT | // Number of Stop bits
// UART_IRDA_DIS | //IRDA Enable/Disable
// UART_MODE_SIMPLEX | //RTS Mode Select
// UART_MODE_FLOWCTRL | //RTS Mode Select
// UART_DIS_BCLK_CTS_RTS | //
// UART_NORMAL_RX | //Recievie Polarity
UART_BRGH_SIXTEEN, //BRGH = 16 //High Baud Rate Select
// UART_INT_TX_BUF_EMPTY | //UART Transmission mode interrupt flag select
// UART_TX_PIN_LOW | //UART Transmit Break bit
UART_TX_ENABLE | //UART transmit enable/disable
UART_RX_ENABLE , //UART recieve enable/disable
// UART_INT_RX_CHAR | //UART Receive Interrupt mode select
// UART_ADR_DETECT_DIS | //UART address detect enable/disable
// UART_RX_OVERRUN_CLEAR //UART OVERRUN bit clear
(unsigned int)(80000000/16/9600-1) // = Fosc/BRGH/Baud Rate -1 //baud rate: 9600bps
);
setbuf(stdout,NULL); //Line buffering off
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"PI32MX460F512L");//C30�Ƃ͈قȂ�Aarguement �s�v
lcd_str(Buf); //�t���ɕ\��
ConfigIntUART2(UART_INT_PR2 | UART_RX_INT_EN); //UART2���荞�݃��x�������x��2�ɐݒ�
INTEnableSystemMultiVectoredInt(); //�}���`�x�N�g�����荞����
while(1)
{
//�i�v���[�v
}
}
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//*************************************************************************
#include <proc/p32mx460f512l.h> //PIC32MX460F512L
//#include <proc/p32mx795f512l.h> //PIC32MX460F512L
#define Clock 80000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATEbits.LATE7 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATEbits.LATE6 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATEbits.LATE5 //LCD��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATEbits.LATE4 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATEbits.LATE3 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATEbits.LATE2 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//�@�@�@�@UART PC-PIC�@ //���荞�ݕ����i�ԐM���j
//�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@PIC32MX460F512L�@
#include <proc/p32mx460f512l.h> //PIC32MX795F512L
#include <plib.h> // PIC32 peripheral library
//for SYSTEMConfigPerformance()
#include <stdio.h>
#include "1lcd_lib_C32.h"
// Configuration
// CPU=80MHz Peri=80MHz,HS+PLL,Divider=1/2,PLL=x20,WDT=Off
#pragma config FNOSC=PRIPLL, POSCMOD=HS, FPLLIDIV=DIV_2
#pragma config FPLLMUL=MUL_20, FPBDIV=DIV_1, FPLLODIV=DIV_1
#pragma config FWDTEN=OFF, ICESEL=ICS_PGx2
int i = 0;
char buf[20];
char Buf[20];
char Saigou[] = "Saigou";
char Takamori[] = "Takamori";
char Katsura[] = "Katsura";
char Kogorou[] = "Kogorou";
char Sakamoto[] = "Sakamoto";
char Ryouma[] = "Ryouma";
char Pardon[] = "Pardon?";
char* str;
char Space = ' ';
void __ISR(_UART2_VECTOR, ipl2) IntUart2Handler(void)
{
mU2RXClearIntFlag(); //�@���荞�݃t���O�N���A
while(!DataRdyUART2()); //UART�o�b�t�@�[�Ƀf�[�^������܂ł܂�
buf[i] = getcUART2();
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
if(strcmp(buf,Sakamoto) == 0)str = Ryouma;
else if(strcmp(buf,Saigou) == 0) str = Takamori;
else if(strcmp(buf,Katsura) == 0) str = Kogorou;
else str = Pardon;
printf(str); //�@�ԐM���@������Ƃ���PC�Ɉꊇ���M
putcUART2('\r'); //�@������I�[���䕶���𑗐M
//�t���ɏo��
lcd_clear(); //�S����
lcd_str(&buf[0]); // �J�n���b�Z�[�W1�s�ڕ\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"%s%c",str,Space); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf); // �J�n���b�Z�[�W2�s�ڕ\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
i++;
}
}
int main(void)
{
SYSTEMConfigPerformance(80000000); // �V�X�e���œK��
TRISE = 0;
TRISFbits.TRISF4 = 1;
TRISFbits.TRISF5 = 0;
OpenUART2 //UART2�̐ݒ�iU2MODE���W�X�^,U2STA���W�X�^,U2BRG���W�X�^�̐ݒ�j
(
UART_EN | // UART enable/disable
// UART_RX_TX | //UART communication with ALT pins
// UART_DIS_WAKE | //UART Wake-up on Start
// UART_DIS_LOOPBACK | //UART Loopback mode enable/disable
// UART_DIS_ABAUD | //Input to Capture module
UART_NO_PAR_8BIT | // Parity and data bits select
UART_1STOPBIT | // Number of Stop bits
// UART_IRDA_DIS | //IRDA Enable/Disable
// UART_MODE_SIMPLEX | //RTS Mode Select
// UART_MODE_FLOWCTRL | //RTS Mode Select
// UART_DIS_BCLK_CTS_RTS | //
// UART_NORMAL_RX | //Recievie Polarity
UART_BRGH_SIXTEEN, //BRGH = 16 //High Baud Rate Select
// UART_INT_TX_BUF_EMPTY | //UART Transmission mode interrupt flag select
// UART_TX_PIN_LOW | //UART Transmit Break bit
UART_TX_ENABLE | //UART transmit enable/disable
UART_RX_ENABLE , //UART recieve enable/disable
// UART_INT_RX_CHAR | //UART Receive Interrupt mode select
// UART_ADR_DETECT_DIS | //UART address detect enable/disable
// UART_RX_OVERRUN_CLEAR //UART OVERRUN bit clear
(unsigned int)(80000000/16/9600-1) // = Fosc/BRGH/Baud Rate -1 //baud rate: 9600bps
);
setbuf(stdout,NULL); //Line buffering off
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"PI32MX460F512L");//C30�Ƃ͈قȂ�Aarguement �s�v
lcd_str(Buf); //�t���ɕ\��
ConfigIntUART2(UART_INT_PR2 | UART_RX_INT_EN); //UART2���荞�݃��x�������x��2�ɐݒ�
INTEnableSystemMultiVectoredInt(); //�}���`�x�N�g�����荞����
while(1)
{
//�i�v���[�v
}
}
�@
�����쌋�ʁ�
| �@���M�����@ |
�@�ԐM�����@ |
�t���\��
�㑤�@�c�c�@���M���t��
�@�@�@�@�@�@�@�@�@�P�s�ځF�@���M������
�@�@�@�@�@�@�@�@�A�Q�s�ځF�@��M������
�����@�c�c�@��M���t��
�@�@�@�@�@�@�@�@�@�P�s�ځF�@��M������
�@�@�@�@�@�@�@�@�A�Q�s�ځF�@�ԐM������ |
Saigou
|
Takamori
|
|
Katsura
|
Kogorou
|
|
| Sakamoto |
Ryouma |
|
Tokyo
|
Pardon
|
|
�i�R�j�@������̑���M�@ (���p�ҁ@�@�T���`�F�b�N�A�n���h�V�F�[�N�A�^�C���A�E�g�j
�@�@����M�f�[�^�͉��邱�Ƃ�����܂��B�����Ƃ��Ă͈ȉ��̂悤�Ȃ��̂�����܂��B
�@�@�@�E�m�C�Y�ɂ��`���g�`�̗���y�ё���M��H�̌듮��
�@�@�@�E�X�C�b�`�Ȃǂ̊O�������݂�^�C�}�����݂ɂ�鑗�M���A��M���̃\�t�g�E�F�A�����݂ɋN������O��
�@�@�@�E��M���̏����\�͕s��
�@�@�@�E����M�̃^�C�~���O�s��
�@�@�@�E�G���[���[�g���傫�����߂̌듮��@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��
�@�@���M�f�[�^�Ɍ�肪�Ȃ�����M���Ń`�F�b�N������@�ɃT���`�F�b�N�iSum�@Check�j�Ɖ]�����@������܂��B���M���Ǝ�M
�@���ő��M�f�[�^�����Z���A��v�����ꍇ�͌�肪�Ȃ��Ɣ��f�����茟�o�A���S���Y���̂ЂƂł��B�܂��ʐM�̊m������
�@���߂���@�Ƃ��đ��M���Ǝ�M�����₦���h�m�F�M���h���������Ȃ���ʐM���s���n���h�V�F�[�N�Ɖ]�����@������܂��B
�@�@�ȉ��Ɂ@�T���`�F�b�N�ɂ���茟�o�A�^�C���A�E�g����y�уn���h�V�F�[�N�ɂ��m���������߂��ʐM�̗���Љ�܂��B
�@������i�d�l��
�@���@�f�[�^���M�� PIC
�@�@�E�@��M���t���̂P�s�ڕ\���p�f�[�^�Ƃ��ā@0�`65535�̐�����300msec���ɃC���N�������g���Ȃ��瑗��B�C���N�������g��
�@�@�@��M��PIC����ACK(=0x06)�������Ă������Ƃ��m�F������ɂ����Ȃ��BACK�ȊO�̕������ԐM����Ă����ꍇ�͓���
�@�@�@�������đ��M����B�A���A�T��đ��M���J��Ԃ��Ă�ACK�������Ă��Ȃ��ꍇ�̓C���N�������g�������Ȃ��Ď��̐�����
�@�@�@����B
�@�@�@�@�@�@�i��j�@���M�f�[�^�@�c�c�@�@Counts=2568
�@�@�E�@��M���t���̂Q�s�ڕ\���p�f�[�^�Ƃ��ā@�habcdefghijklimopq�h�𑗂�B
�@�@�E�@�f�[�^�̃w�b�_�[�Ƃ���ESC ( = 0x1b ) ��STX ( = 0x02 )�𑗂�
�@�@�E�@���M�f�[�^���o�C�g���ɉ��Z���ĉ��Z���ʂ𑗐M�f�[�^�̌�ɒlj�����B
�E�@����M�f�[�^��32�o�C�g�i=16�o�C�g�~2�j�̌Œ蒷�Ƃ���B ���Ȃ킿�@�S���M�f�[�^�͍��v36�o�C�g�Œ蒷�̈ȉ���
�@�@�@�@����B
�@�@�@�@�@�@ESC�@�{�@STX�@�{�@�f�[�^�i32�o�C�g�j�@�{�@�f�[�^���Z�l�̉���8�r�b�g�@+�@�f�[�^���Z�l���8�r�b�g�@
�@�@�E�@�������^���[�X�C�b�`��1�������C�ӂ̃^�C�~���O��LED��_���ł���悤�ɂ���B �O��������ړI�Ƃ��ĔC�ӂ̃^�C�~
�@�@�@�@���O�ŊO�������݂���������悤�ɂ���B
�@ �E�@�^�C���A�E�g����������Ȃ��B
�@���@�f�[�^��M�� PIC
�E�@��M�����f�[�^�͂����������ɋL������B
�@ �E�@��M�f�[�^���o�C�g���ɉ��Z���đ��M��PIC�Ōv�Z�����f�[�^�Ɣ�r���āA����� ����Ήt���ɕ\�����ā@ACK��
�@�@�@�@�ԐM����B�@����łȂ���Ύ�M�f�[�^�͔j����NAK(=0x15)��ԐM���A�đ��M��v������B
�E�@�^�C���A�E�g����������Ȃ�
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC�P�WF�S�T�Q�~�Q���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
�@
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
//****************************************************************
// ���M���@PIC�@�v���O����
//****************************************************************
//PIC18F452+�t���@�@���@ RS232C(5V)�@���@PIC16F873+�t��
#include "18f452.h"
#include <string.h>
#use delay(clock=40000000) // 40MH���i�V�X�e���N���b�N���g���j��10MH���i�O�����U�q���g���j�~4�iPLL�{���j
#FUSES H4,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,RCV=PIN_C7,XMIT=PIN_C6) // �{�[���[�g = 9600bps TX=RC6,RX=RC7,
#define STX 0x02 // �r�s�w
#define ETX 0x03 // �d�s�w
#define ENQ 0x05 // �d�m�p
#define ACK 0x06 // �`�b�j
#define NAK 0x15 // �m�`�j
#define ESC 0x1b // �d�r�b
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
#byte port_PIR1=0x0F9E
unsigned long int Count = 0;
char buf1[]=" ", //�t���̂P�s�ڗp�@�c�c�@�����e�����Ƃ���17�o�C�g���u�����N�ŏ�����
buf2[]=" "; //�t���̂Q�s�ڗp �c�c�@�����e�����Ƃ���17�o�C�g���u�����N�ŏ�����
int LED1 = 0;
unsigned int NG_Count = 0;
char timed_getc()
{
char returnValue;
int32 timeout;
timeout = 0;
while(!kbhit()&&(++timeout< 100000)) // �^�C���A�E�g���ԓ��Ƀf�[�^����M���Ȃ����while()���[�v����
//�^�C���A�E�g���� �� 1000 msec
delay_us(10); // 10��sec
if(kbhit()) //�^�C���A�E�g���ԓ��Ƀf�[�^���擾�����ꍇ�̓f�[�^���擾���A���̃f�[�^��Ԃ�
returnValue = getc();
else //�@�^�C���A�E�g���ԓ��Ńf�[�^���擾�ł��Ȃ������ꍇ��NAK��Ԃ�
returnValue = NAK;
return returnValue;
}
void Transmit(char* buf1,char* buf2) // ���M��
{
int i;
unsigned long int TotalSum;
unsigned int sum[2];
putc(ESC);//ESC�𑗐M
putc(STX);//STX�𑗐M�@
printf("%s",buf1); // buf1�i16�o�C�g�Œ蒷�j��16�o�C�g���M�@�iNULL'\0'�͑��M����Ȃ��j
printf("%s",buf2); // buf2�i16�o�C�g�Œ蒷�j��16�o�C�g���M�@�iNULL'\0'�͑��M����Ȃ��j
TotalSum = 0;
for(i = 0; i < 16; i ++)
TotalSum = TotalSum + (unsigned int)buf1[i] + (unsigned int)buf2[i]; //�T���̌v�Z
sum[0] = (unsigned int)TotalSum;
sum[1] = (unsigned int)(TotalSum >> 8);
putc(sum[0]); //�T���f�[�^�̉��ʂW�r�b�g�𑗐M
putc(sum[1]); //�T���f�[�^�̏�ʂW�r�b�g�𑗐M
}
void Tranceiver()
{
char Response;
sprintf(buf1,"Count=%lu",Count);//�����������O��������ɕϊ��@vs Count = atol(s1)
// sprintf(s1,"%d" ,Count) vs Count = atoi(s1)
// sprintf(s1,"%f",Vaule) Vs Value = atof(s1)
buf1[strlen(buf1)] = ' '; //������buf1�̏I�[��NULL'\0'��SPACE'�@'�ɕύX�@
buf1[16] ='\0'; //������buf1��16�o�C�g�̕�����ɕϊ�
sprintf(buf2,"abcdefghijklmopq");// ������=16�o�C�g�@�F�@sprintf()��buf2[16]��NULL'\0'���
do
{
Transmit(buf1,buf2);
Response = timed_getc();
lcd_clear();
if(Response == ACK)printf(lcd_data,"Response=ACK");//ACK���Ԃ��Ă�����t����Response=ACK�ƕ\��
else if(Response == NAK)printf(lcd_data,"Response=NAK");
else
{
printf(lcd_data,"Response=%x",Response); //ACK NAK�ȊO���Ԃ��Ă�����Ԃ��Ă����������A�X�L�[�R�[�h�ŕ\��
}
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,"Counts=%lu",Count);
NG_Count ++;
}while((Response != ACK) && (NG_Count < 5)); // ACK���ԐM����Ă���܂� �܂��͂T��̍đ��M�܂ő��M���J��Ԃ�
NG_Count = 0;
delay_ms(300);
Count = Count +1; //���M���鐮�����C���N�������g
if(Count >= 65520) Count = 0;
}
#INT_EXT1
void EXTX1() //�@�X�C�b�`�ɂ��O���i�O�������݁j
{
delay_ms(50);
if(input(PIN_B1) == 0)
{
if(LED1 == 1)
{
LED1 = 0;
output_high(PIN_B5); //RB5,6,7LED�@����
output_high(PIN_B6);
output_high(PIN_B7);
}
else
{
LED1 = 1;
output_low(PIN_B5); // RB5,6,7 LED �_��
output_low(PIN_B6);
output_low(PIN_B7);
}
}
}
main(){
set_tris_c(0b10000000);// �K�{ in = RC7
ext_int_edge( 1, H_TO_L); // Set up PIC18 EXT1
//RB1(INT1)�|�[�g���@high����low�ɕω������������݂�������悤�ɐݒ�
LED1 = 1;
output_low(PIN_B5); //�@�d��������LED����
output_low(PIN_B6); //�@�d��������LED����
output_low(PIN_B7); //�@�d��������LED����
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"Master First");
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,"Master Second");
timed_getc(); // �@��M�o�b�t�@�[�N���A (�d�v)
enable_interrupts(INT_EXT1); //RB1����̊O�������݂�����
enable_interrupts(GLOBAL); //�@���ׂĂ̊��荞�݂�����
while(1)
{
Tranceiver();
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
//-------------------------------------------------------------------------
//*********************************************************
//��M��PIC�@�v���O����
//*********************************************************
//�T���`�F�b�N ���@�@OK�Ȃ�t���ɕ\���AACK��ԐM
// ���@�@NG�Ȃ�f�[�^�͊��Ă�ANACK��ԐM
#include <18F452.h>
#include <string.h>
#use delay(clock=40000000)//40MHz
#FUSES HS,NOWDT,PUT,BROWNOUT,NOPROTECT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7) // TX=RC6,RX=RC7
#byte port_PIR1=0x0F9E
#define STX 0x02 // �r�s�w
#define NAK 0x15 // �m�`�j
#define ESC 0x1b // �d�r�b
#define ACK 0x06 // �`�b�j
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
int n = 0,data;
char RX1[16],RX2[16];
char RX1_LCD[17],RX2_LCD[17];
int StartDetect = 0;
unsigned long int sum[2];
unsigned long int NakCount = 0;
char timed_getc() //�^�C���A�E�g�tgetc()
{
char returnValue;
int32 timeout;
timeout = 0;
while(!kbhit()&&(++timeout< 100000)) // �^�C���A�E�g���ԓ��Ƀf�[�^����M���Ȃ����while()���[�v����
//�^�C���A�E�g���� �� 1000 msec
delay_us(10); // 10��sec
if(kbhit()) //�^�C���A�E�g���ԓ��Ƀf�[�^���擾�����ꍇ�̓f�[�^���擾���A���̃f�[�^��Ԃ�
returnValue = getc();
else //�@�^�C���A�E�g���ԓ��Ńf�[�^���擾�ł��Ȃ������ꍇ��NAK��Ԃ�
returnValue = NAK;
return returnValue;
}
void DataCatch() //�@�f�[�^�擾
{
unsigned int Sender_DataSum, //���M��PIC�����Z�����f�[�^�i�o�C�g�j�̉��Z���v�l�i�����Ă������Z�l�j
Receiver_DataSum; //��M�����f�[�^�i�o�C�g�j�� ��M��PIC�����Z�������Z���v�l
int i;
if(n < 16) RX1[n] = data;
else if(n < 32) RX2[n-16] = data; // ���Ȃ�@�����\��
else if(n < 33) sum[0] = data;
else if(n < 34)
{
sum[1] = data;
Sender_DataSum = sum[0] + (sum[1] << 8);//���M��PIC���v�Z�����T���i���Z�l�j
Receiver_DataSum = 0;
for(i = 0; i < 16; i++)
Receiver_DataSum = Receiver_DataSum + (unsigned int)RX1[i] + (unsigned int)RX2[i];
//��M���Ōv�Z�����T��
if(Receiver_DataSum == Sender_DataSum) //��M�����Ȃ�@�t���ɕ\��
{
for(i = 0; i < 16; i++)
{
RX1_LCD[i] = RX1[i];
RX2_LCD[i] = RX2[i];
}
RX1_LCD[16] = '\0'; //�P�s�ڃf�[�^�F������f�[�^��
RX2_LCD[16] = '\0'; //�Q�s�ڃf�[�^�F������f�[�^��
StartDetect = 0;
lcd_clear();
printf(lcd_data,RX1_LCD);
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
printf(lcd_data,RX2_LCD);
putc(ACK);
}
else
{
putc(NAK); //�@NAK�𑗐M����M���s�𑗐M���ɘA���A�đ��M���˗��@
NakCount++;
StartDetect = 0;
lcd_clear();
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
printf(lcd_data,"NakCount=%lu",NakCount);
}
}
else StartDetect = 0;
n++;
}
void Receive() // ��M��
{
data = timed_getc();
switch(data)
{
case ESC:
StartDetect = 1;
break;
case STX:
if(StartDetect == 1) //�w�b�_�[�� ESC+STX���o
{
StartDetect = 2;
n = 0;
}
else StartDetect = 0;
break;
default:
if(StartDetect == 2)DataCatch(); //�f�[�^�擾��
else StartDetect = 0;
break;
}
}
main(){
set_tris_c(0b10000000);// �K�{ in = RC7 & RC4
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"First Lines");
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,"Second Lines");
delay_ms(500);
while(1)
{
Receive();
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
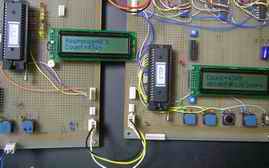
�@�����쌋�ʁ�
�@�@�E���L�̎ʐ^�͑��M��PIC��萮��270�𑗐M��������̂��̂ł��B
�@�@�E���M��PIC�̉t���̂P�s�ڂɂ�ACK�i�T���`�F�b�NOK�j����M���ꂽ���Ƃ��\������Ă��܂��B
�@�@�E��M��PIC�ɂ͎�M���ꂽ�f�[�^�����̂܂ܕ\������Ă��܂��B

���M��PIC�̉t���@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��M��PIC�t��
�@�@�@�@�@